
Première SI : Séquence 7
Comportement des produits à évènement discret
La programmation est une connaissance essentielle dans de nombreux secteurs d’activité. Savoir programmer permet d’être un acteur du développement des nouvelles technologies et permet de structurer son raisonnement.
Le langage de programmation Python favorise la programmation structurée, fonctionnelle et orientée objet.
 |
CH1 : Algorigrammes et algorithmes
|
 |
CH2 : Diagramme d’états – transitions
|
 |
TD1 : Robot tondeur (correction) Le robot tondeur travaille tout seul pour tondre le gazon : pas besoin de le pousser, pas besoin de le guider. On souhaite ici établir l’algorigramme qui décrit le fonctionnement du robot à partir de sa description. (Prérequis : CH1) |
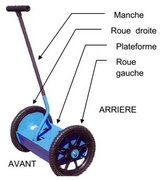 |
TDBAC1 : Gyropopde (2011) (correction) L’objet de cette étude est le gyropode « ElektorWheelie » produit par la société ELEKTOR. Dans le cas où le conducteur s’engagerait, à vitesse maximale, dans un virage, il faut que le programme du calculateur limite les consignes du manche de conduite afin d’éviter le basculement de l’ensemble. L’objectif du TD d’élaborer un programme (algorigramme) qui permettra d’assurer la sécurité du conducteur lorsque celui-ci prend un virage. (Prérequis : CH1) |
 |
TDBAC2 : Tensiomètre (2013) (correction) Le système étudié est un tensiomètre SPG300. L’objectif du TD est d’établir l’algorigramme du programme principal de fonctionnement du tensiomètre. (Prérequis : CH1) |
 |
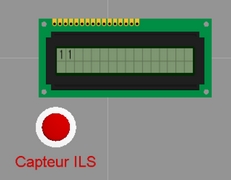
TP1 : Amélioration du mini – stepper (correction) Partie 1 : Détection du déplacement de la pédale L’objectif de cette première partie du TP consacré à l’amélioration du mini-stepper est d’étudier le principe de fonctionnement de la détection du déplacement de la pédale. |
 |
TP2 : Amélioration du mini – stepper (correction) Partie 2 : Affichage du nombre de marches L’objectif de cette seconde partie du TP consacré à l’amélioration du mini-stepper est de créer un algorithme permettant d’afficher le nombre de marches que l’utilisateur monte et de simuler le programme sous Flowcode. Nous programmerons ensuite ce programme dans un Arduino afin de l’expérimenter sur le véritable mini-stepper. |
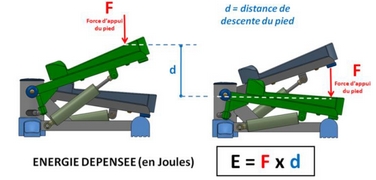 |
TP3 : Amélioration du mini – stepper (correction) Partie 3 : Calcul et affichage du nombre de calories Une relation mathématique permettant de calculer l’énergie dépensée lors de la montée d’une marche en fonction de la vitesse à laquelle cette marche est franchie a été trouvée lors de la séquence n°3. L’objectif de ce TP est d’implanter ce calcul dans le programme Flowcode et Arduino du TP précédent. |
|
|
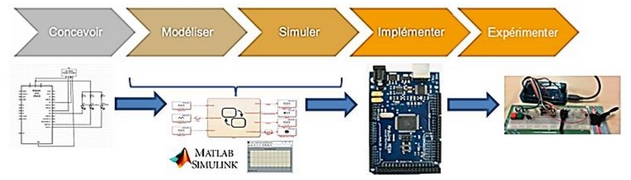
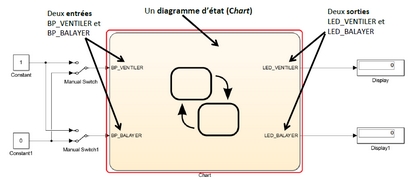
TP4 : Module de commande d’un ventilateur avec les machines à états (correction) Vous avez vu au cours des travaux pratiques précédents comment mettre en œuvre des programmes simples sous Arduino. Malheureusement, lorsque vous aurez besoin de gérer plusieurs tâches simultanément, l’exercice se compliquera ! Ce TP vous présente une solution moderne et efficace pour concevoir un module de commande de ventilateur en utilisant les machines à états sous Matlab et Simulink qui allient simplicité et performances. |
| Séquence n°7 : Comportement des produits à évènement discret | ||||||
| Compétences | Compétences développées | Connaissances associées | Modalités pédagogiques | |||
| TP | Cours | EXOS/TD | TDBAC | |||
| Innover | Rompre avec l’existant, améliorer l’existant | Éléments d’histoire des innovations et des produits | TP1,2,3 | |||
| Analyser |
Analyser le traitement de l’information | Algorithme, programme Langage informatique |
TP2,3 | CH1 | TD1 | TDBAC1,2 |
| Analyser le comportement d’un objet à partir d’une description à événements discrets | Diagramme états-transitions Algorithme |
TP2,3,4 | CH1,2 | TD1 | TDBAC1,2 | |
| Quantifier les écarts de performances entre les valeurs attendues, les valeurs mesurées et les valeurs obtenues par simulation | Écarts de performance absolu ou relatif, et interprétations possibles | TP2,3,4 | ||||
| Modéliser | Traduire le comportement attendu ou observé d’un objet | Comportement séquentiel Structures algorithmiques (variables, fonctions, structures séquentielles, itératives, répétitives, conditionnelles) Diagramme d’états-transitions |
TP2,3,4 | |||
| Associer un modèle à un système asservi | Capteurs | TP1,4 | ||||
|
Expérimenter Simuler |
Conduire des essais en toute sécurité à partir d’un protocole expérimental fourni | Règle de raccordement des appareils de mesure et des capteurs | TP1,4 | |||
| Instrumenter tout ou partie d’un produit en vue de mesurer les performances | Capteurs, composants d’une chaîne d’acquisition Paramétrage d’une chaîne d’acquisition Carte micro – contrôleur |
TP1,2,3,4 | ||||